
[wpcdt-countdown id="734"]
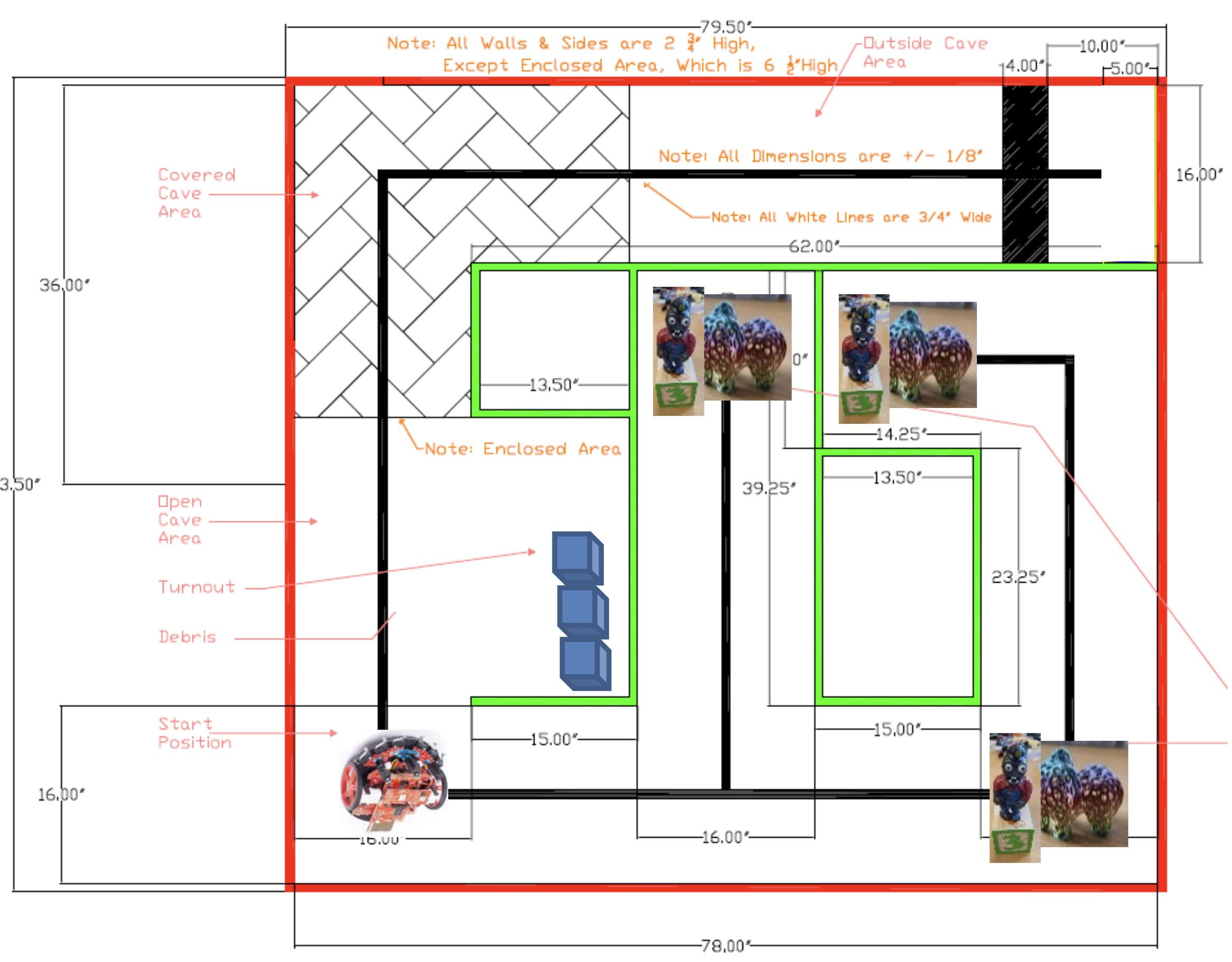
Map
Useful Links
Documents
Library
Additional Zip Library
RSLK Library
install by Library Manager
Analysis
- AUTO4: The robot will autonomously stop at a distance from the end wall that will leave the rescued Rosie in the extraction zone, which is the width of the track, but 10 to 14 inches from the end wall.
- AUTO4_1: Move to the Safe Place (Safe Place):
- White Line Following
- AUTO4_2: Arrived at Safe Place
- Check we arrived
- Two Sonar ( the distance to the wall is < 30)
- Front IR distance < 3 inches
- Open the Gripper
- Check we arrived
- AUTO4_1: Move to the Safe Place (Safe Place):
Control
PS2 Remote Button Define
Button:
L1: Totally Open
L2: Open + 5
R1: Totally Close
R2 Close -5
Mode: Mode Change
Select: Controller Change
Joysticks:
Left_Y: Left Wheel
Right_Y: Right Wheel
Pin Map
TI-RSLK MAX Chassis Board v1.0 Pin Map
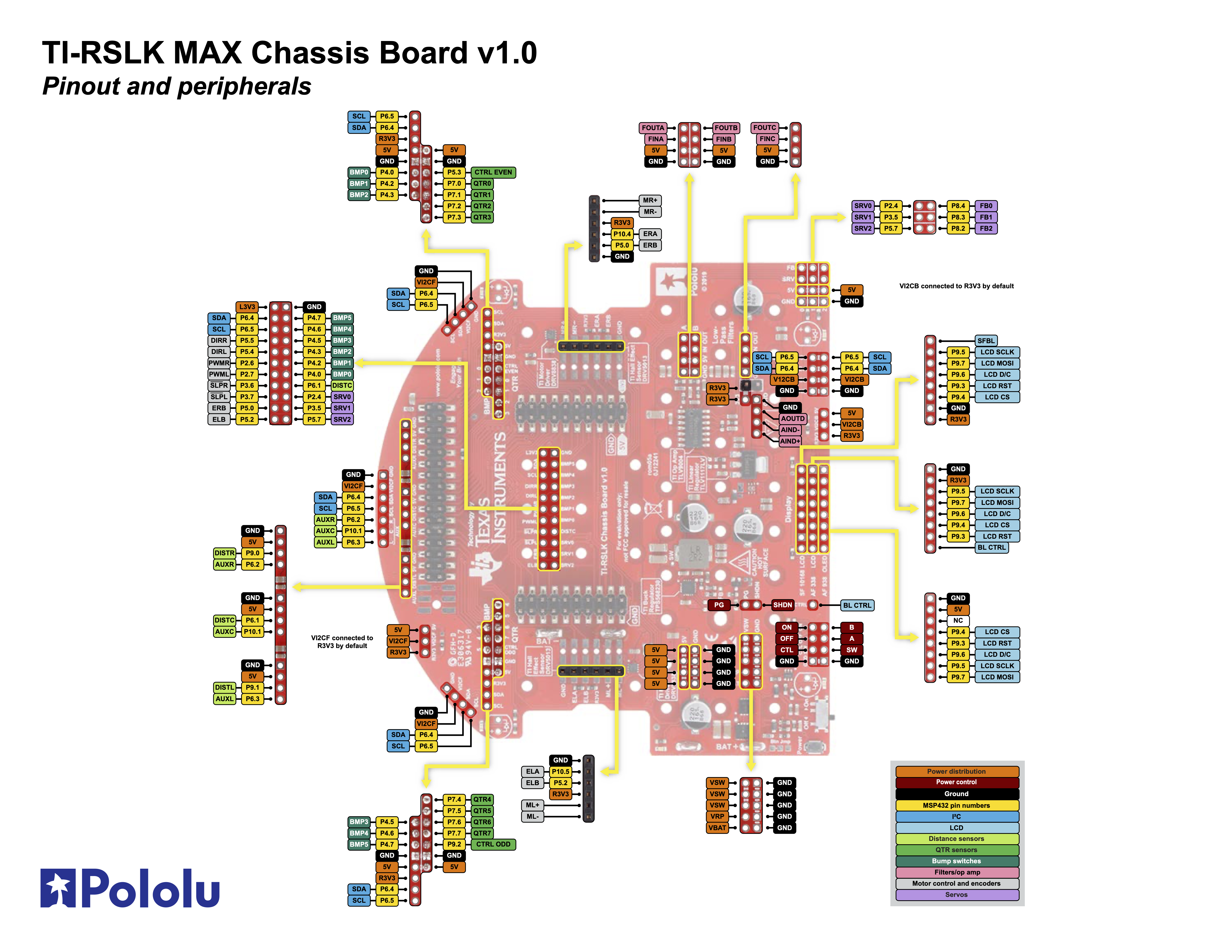
MSP432 Energia Pin Map
